探究ゼミ・プロジェクト〔 学内外と連携し、自由に学ぶ 〕
探究プロジェクト
【探究プロ】大阪工業大 自律移動ロボットプログラミング
【探究プロ】LiDAR搭載車輪移動型ロボットの自律走行プログラミング
8月5,6日の2日間,大阪梅田にある大阪工業大学梅田キャンパスで探究プロジェクト「LiDAR搭載車輪移動型ロボットの自律走行プログラミング」を実施し,高校1,2年あわせて9人の生徒が参加しました。 LiDAR(Light Detection And Ranging)とは対象物に光を照射し,その反射光を光センサでとらえ距離を測定するもので,私たちが普段よく使うスマートフォンにも搭載されています。 今回のプロジェクトでは,このLiDARを搭載した車輪移動型ロボットの仕組み,プログラミング体験をしました。
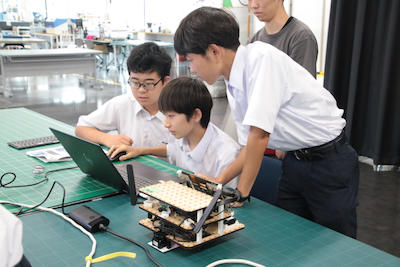
このプロジェクトは,本校の進路イベント「One Day College」で講義をしていただいている同大学ロボティクス&デザイン工学部の廣井富先生と同大学情報科学部の宮脇健三郎先生の協力で実現しました。 普段は入ることができない学生のものづくりエリアの一角に集まり,初めて体験するプログラミングに戸惑いながらも,ロボットが意図通りに動くことに驚いていました。
1日目,パソコン上でロボットシミュレータを操作し,LiDAR搭載ロボットの仕組みを学んでいきました。 その後,実際にロボットを動かします。 およそ3メートル四方のコースの所どころには障害物が設置されています。 まずはその中を自由に走らせ,ロボットにそのコースの「地図」を作成・学習させていきます。 この地図をもとに,2日目以降自律移動のためのプログラミングを行います。
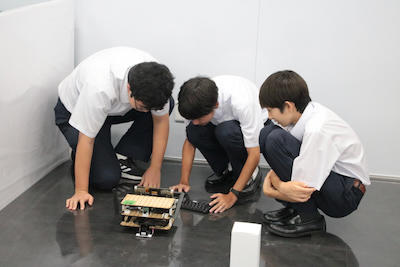
2日目,1日目に作成した地図データをもとにまずはシミュレータで,初期位置の設定方法と通過する「ウェイポイント」の設定について学びます。 プログラミング言語Pythonで書かれたプログラムの一部を変更しながら,ロボットが目標に向かって自律移動できるよう工夫していきます。 最後に,実際のロボットをコースの中で動かし,意図通りに自律移動するかどうか,1チームずつ挑戦。すべてのチームが無事にゴールポイントに到達することができました。
プロジェクトの最後に「高校で学ぶ数学や物理の知識が,ロボット工学の基礎になっている」とのお話がありました。 実際にロボットを動かし楽しい反面,その理論の難しさにも気づきました。 学校で今学んでいることと最先端の技術,大学後の学びとつながっていることに参加した生徒は気づいた様子でした。